How to configure#
Considerations#
Start by asking yourself the following questions related to your application:
What range do we need to cover, from \(r_\text{near}\) to \(r_\text{far}\)?
Do we need to distinguish multiple objects? If so, how close could they be?
Do we need to measure distance to objects? If so, what trueness is needed?
If objects move, how fast could they go?
Do we need to measure motions of objects? If so, at what speeds?
With what rate do we need to obtain a result?
What are our requirements on overall power consumption?
What is the farthest distance from the sensor that an object may appear which could result in range ambiguities?
Range-related parameters#
Having these questions and answers in mind, we go though the parameters in order, starting with those related to the range:
Use the highest profile possible for maximum overall power and time efficiency. It is often limited by \(r_\text{near}\) since the close-in distance (CID) must be smaller than \(r_\text{near}\), and higher profiles have a larger CID. If you need to resolve multiple objects, the duration of the pulse must be short enough to give the resolution needed. Finally, lower profiles may give more precise distance measurements.
The step length should be as long as possible to reduce memory usage and decrease measurement time. It is typically limited by two things:
Distance measurement trueness: As a rule of thumb, the steps need to be 1/10 to 1/2 of the required trueness. Note that as steps get smaller, other factors such as SNR and pulse duration (profile) have a bigger impact on the general accuracy.
The profile: If steps are too long, reflecting objects may fall between points, creating “blind spots” in the range. See Figure 3 for an example.
From here, the start point and number of points can be set. Just make sure the points cover \(r_\text{near}\) to \(r_\text{far}\). Due to the pulse length (profile), the start and end points does not necessarily have to pass \(r_\text{near}\) and \(r_\text{far}\). Again, see Figure 3 for an example of this. However, keep in mind that distance measurements typically cannot be done in the very edge of the range, so you might have to extend it outside \(r_\text{near}\) and \(r_\text{far}\) anyways.
Set the PRF such that the resulting maximum unambiguous range (MUR) extends beyond the farthest distance an object may appear. Keep it as high as possible since a higher PRF is more power and time efficient overall.
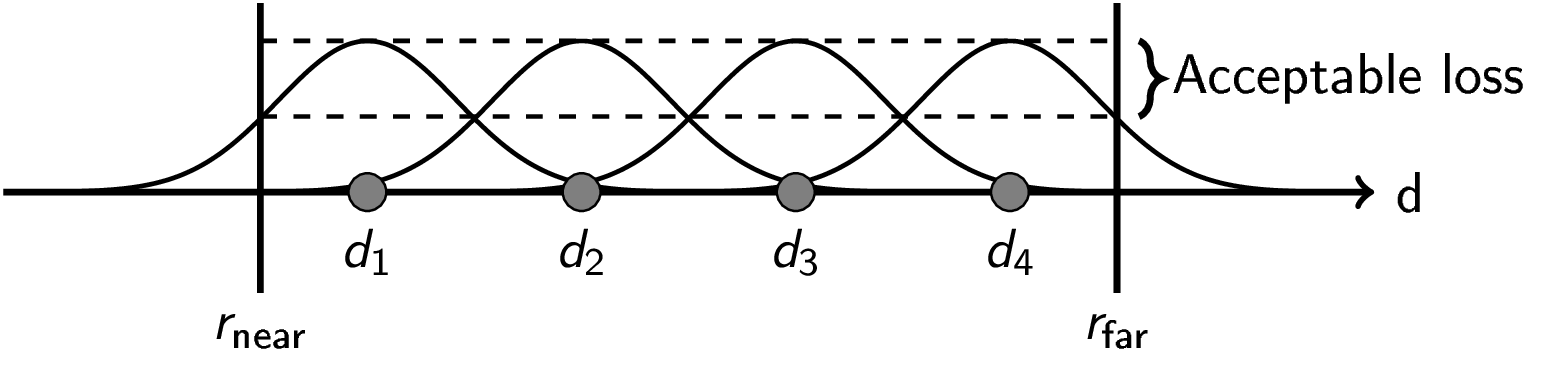
Figure 3 A sketch of setting up the measurement range for efficient coverage of a given area.#
Other parameters#
Leave receiver gain at the default value and reduce if saturation occurs.
Leave enable TX set (default).