Frames, sweeps and subsweeps#
The sparse IQ service may be configured to perform several sweeps at a time in a so-called frame. Thus, every frame received from the sensor consists of a number of sweeps. Every sweep in turn consists of a number of points spanning the configured distance range (see Measurement range).
Some examples of suitable applications for multiple sweeps per frame are detecting motions, measuring velocities, and tracking objects.
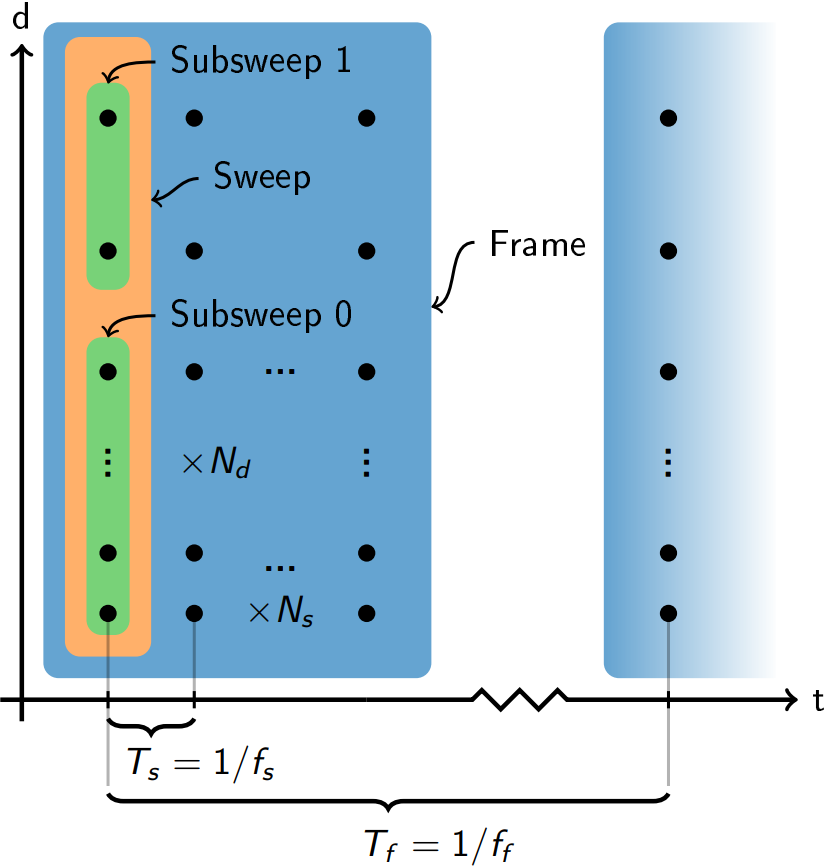
Figure 10 An illustration of the sweep and frame concept.#
As shown in Figure 10, \(N_s\) is the number of sweeps per frame (SPF). Typical values range from 1 to 64. The sweeps are sampled consecutively, where \(T_s\) is the time between two corresponding points in consecutive sweeps. This value is typically specified as the sweep rate \(f_s=1/T_s\). It is given by the sensor configuration, but is optionally limited to a fixed rate, letting the sensor idle between sweeps. Typical sweep rates range from 1 kHz to 10 kHz.
In a similar fashion as for sweeps, the frame rate is defined as \(f_f=1/T_f\). Typical values range from 1 Hz to 100 Hz. The sensor may idle in efficient low power states between frames, so maximizing the idle time between frames is crucial for minimizing the overall power consumption.
The timing of frames can be done in two ways – either by letting the host trigger measurements of new frames, or by letting the sensor itself trigger on a periodic timer.
Subsweeps#
The purpose of the subsweeps is to offer more flexibility when configuring the sparse IQ service. As the name implies, a subsweep represent a sub-region in the overall sweep. Each subsweep can be configured independently of other subsweeps, e.g. two subsweeps can be configured with overlapping range and different profiles.
The concept is utilized in the Distance Detector, where the measured range is split into subsweeps, each configured with increasing HWAAS and Profile, to maintain SNR throughout the sweep, as the signal strength decrease with the distance.
Measurement execution order#
As previously discussed, a frame consists of one or more sweeps, which in turn can be divided into multiple subsweeps. The execution order is as follows:
The points are measured along the distances defined by start point, num points and step length.
If subsweeps are utilized, they are measured in the order defined by the sensor configuration.
After the measurement of the sweep (potentially containing subsweeps) is completed, the next sweep is measured.
This is repeated until sweeps per frame sweeps have been measured
Lastly the frame is formed by stacking the sweeps.
The following example illustrates the concept:
Assume a sensor configuration with three subsweeps and two sweeps per frame. Firstly, points are measured according to the distances specified by the first subsweep, followed by the measurements according to the second and third subsweep. Next, a second sweep is performed with the same subsweep configuration. Lastly, the two sweeps, containing three subsweeps, are stacked to form the frame.
Limitations#
As with the number of points \(N_d\), the only limitation on the number of sweeps per frame \(N_s\) itself is related to the available buffer size of 4095 complex numbers. The buffer usage is the number of points \(N_d\) times the number of sweeps per frame \(N_s\). In short, \(N_d \cdot N_s \leq 4095\).